1.1.3. Распределенные системы автоматизации
С ростом количества датчиков, увеличением площади территории, на которой расположена автоматизированная система и усложнением алгоритмов управления становится более эффективным применение распределенных систем [17-22]. Распределенные системы состоят из множества территориально разнесенных контроллеров и модулей ввода-вывода. При таком подходе структура распределенной системы и структура алгоритма ее работы становятся подобны структуре самого объекта автоматизации, а функции сбора, обработки данных, управления и вычисления оказываются распределенными среди множества контроллеров. Каждый контроллер работает со своей группой устройств ввода-вывода и обслуживает определенную часть объекта управления. В частности, технологическое оборудование, как правило, выпускается с уже встроенными ПЛК. Тенденция децентрализации управления и приближения контроллеров к объектам управления является общей для всех систем автоматизации и отчасти навеяна успехами объектно-ориентированного программирования. Кроме того, сосредоточенная система является частью или частным случаем распределенной, поэтому появление распределенных систем является следствием естественного развития от частного к общему.
Распределенную систему управления (РСУ, DCS — Distributed Control System) можно определить как систему, состоящую из множества устройств, разнесенных в пространстве, каждое из которых не зависит от остальных, но взаимодействует с ними для выполнения общей задачи [19]. В предельном случае элементы системы могут находиться на разных континентах земного шара, а связь между ними может выполняться через Интернет. В качестве «множества устройств» могут выступать любые микропроцессорные устройства, например ПЛК или разнесенные в пространстве модули ввода-вывода одного контроллера. Однако в последнем случае только сбор данных можно рассматривать как распределенный, в то время как функция управления является сосредоточенной в одном контроллере.
Максимальные преимущества распределенной системы достигаются, когда контроллеры работают автономно, а обмен информацией между ними сведен до минимума.
Распределенная система имеет следующие характеристики, отличающие ее от сосредоточенной:
большее быстродействие благодаря распределению задач между параллельно работающими процессорами;
повышенную надежность (отказ одного из контролеров не влияет на работоспособность других);
большую устойчивость к сбоям;
более простое наращивание или реконфигурирование системы;
упрощенную процедуру модернизации;
большую простоту проектирования, настройки, диагностики и обслуживания благодаря соответствию архитектуры системы архитектуре объекта управления, а также относительной простоте каждого из модулей системы;
улучшенную помехоустойчивость и точность благодаря уменьшению длины линий передачи аналоговых сигналов от датчиков к устройствам ввода;
меньший объем кабельной продукции, пониженные требования к кабелю и более низкая его стоимость;
меньшие расходы на монтаж и обслуживание кабельного хозяйства.
Распределенная система смягчает также требования к операционным системам (ОС) реального времени (см. главу 9), поскольку задачи распределены между параллельно работающими контроллерами, на каждом из которых установлена отдельная ОС.
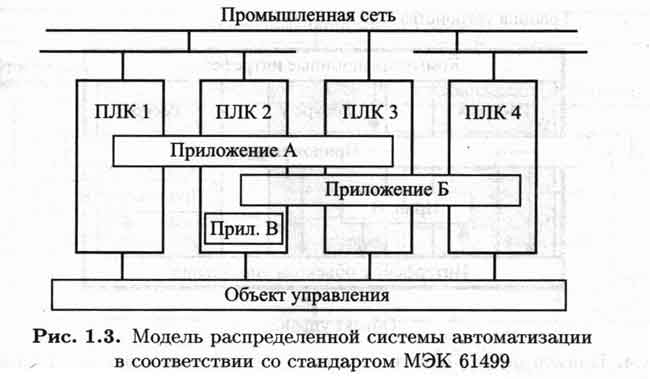
Для эффективного проектирования распределенных систем автоматизации необходимы строгие методы их описания. Необходимо также обеспечить совместимость и взаимозаменяемость между собой всех устройств, входящих в систему и выпускаемых разными производителями. Для этих целей был разработан международный стандарт МЭК 61499 «Функциональные блоки для индустриальных систем управления» [20] (см. также главу 9). Он использует три уровня иерархии моделей при разработке распределенных систем: модель системы, модель физических устройств и модель функциональных блоков. Модели всех уровней в соответствии со стандартом представляются в виде функциональных блоков, которые описывают процесс передачи и обработки информации в системе.
Особенностью функциональных блоков стандарта МЭК 61499 является то, что они учитывают не только традиционное инициирование выполнения алгоритма с помощью тактирования или временного расписания, но и по признаку наступления некоторых событий (событийное управление). Событийное управление является более общим, а тактирование можно рассматривать как его частный случай, заключающийся в периодическом появлении одного и того же события (сигнала тактирования).
Функциональные блоки (ФБ) могут быть использованы также для поддержания всего жизненного цикла системы, включая проектирование, изготовление, функционирование, валидацию* ( *Валидация (термин стандарта ИСО 9001) - подтверждение соответствия системы требованиям ее назначения. Выполняется с участием потребителя. Не путать с верификацией - доказательством достоверности.) и обслуживание. Примеры применения стандарта и дальнейшая разработка методики проектирования распределенных систем с его помощью описываются в работах [9-12].
Модель распределенной системы автоматизации в соответствии со стандартом МЭК 61499 может быть представлена как набор физических устройств (например, ПЛК), взаимодействующих между собой с помощью одной или нескольких промышленных сетей (рис. 1.3).