Нижеследующий текст взят из книги Денисенко В.В "Компьютерное управление технологическим процессом, экспериментом, оборудованием" М. "Горячая линия-Телеком" 2009г.
Архитектура автоматизированной системы управления технологическим процессом - АСУ ТП
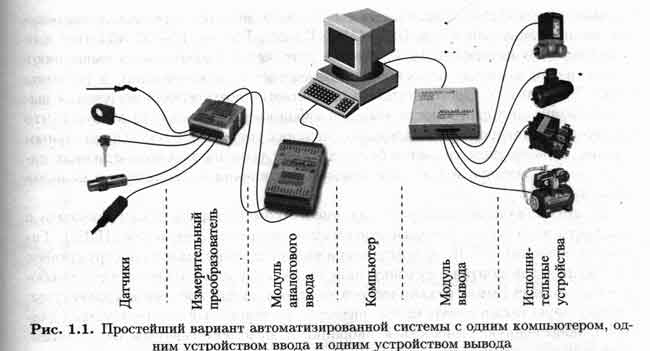
Автоматизированная система управления призвана облегчить труд человека, расширить его функциональные возможности или заменить полностью, если это возможно. Поэтому архитектура систем автоматизации во многом напоминает строение человека: роль органов чувств выполняют датчики, роль рук, ног и органов речи - исполнительные устройства, роль мозга - компьютер или контроллер. Благодаря такой аналогии архитектура системы автоматизации становится понятной любому человеку на интуитивном уровне.
Разновидности архитектур АСУ ТП
Существует огромное разнообразие датчиков (температуры, влажности, давления, потока, скорости, ускорения, вибрации, веса, натяжения, частоты, момента, освещенности, шума, объема, количества теплоты, тока, уровня и др.) [1], которые преобразуют физическую величину в электрический сигнал. Если параметры сигнала не согласуются с параметрами входа аналого-цифрового преобразователя (АЦП) или не соответствуют стандарту (например, входной величиной АЦП является напряжение в диапазоне 0...10 В, а датчик (термопара) имеет выходное напряжение в диапазоне от 0 до 100 мВ), то используют измерительный преобразователь (рис. 1.1), который обеспечивает нормализацию сигнала датчика (приведение к стандартным диапазонам изменения, обеспечение линейности, компенсацию погрешности, усиление и т.п.). Измерительные преобразователи обычно совмещают с модулями аналогового ввода.
Измерительные преобразователи могут иметь встроенный АЦП или ЦАП (цифро-аналоговый преобразователь), а также микропроцессор для линеаризации характеристик датчика и компенсации погрешностей аналоговой части системы. В последнее время получили распространение цифровые датчики, объединяющие в себе первичный преобразователь физической величины в электрический сигнал, измерительный преобразователь и АЦП. Примером могут служить датчики температуры DS18B20 фирмы Dallas Semiconductor, у которых выходной сигнал является цифровым и соответствует спецификации интерфейса 1-Wire (www.maxim-ic.com).
Для ввода в компьютер аналоговых сигналов служат модули аналогового ввода (рис. 1.1).
Модули ввода могут быть общего применения (универсальные) или специализированные. Примером универсального модуля ввода является NL-8AI (www.RealLab.ru), который воспринимает сигналы напряжения в диапазонах ±150 мВ, ±500 мВ, ±1 В, ±5 В, ±10 В и тока в диапазоне ±20 мА. Примером специализированного модуля является модуль ввода сигналов термопар NL-8TI (www.RealLab.ru), который работает только с термопарами и содержит встроенные во внутреннюю память модуля таблицы поправок для компенсации нелинейностей термопар и температуры холодного спая.
Кроме модулей аналогового ввода широко распространены модули дискретного ввода, которые не содержат АЦП и позволяют вводить сигналы, имеющие два уровня (например, сигналы от концевых выключателей, датчиков открывания двери, пожарных датчиков, охранных датчиков движения и т. п.). Уровни входных сигналов модулей дискретного ввода могут изменяться в диапазоне, как правило, 0...24 В или 0...220 В. Модули с входом 220 В используются, например, для регистрации наличия напряжения на клеммах электродвигателя или нагревательного прибора.
Отдельное место занимают устройства счетного ввода, которые имеют дискретный вход и позволяют считать количество или частоту следования импульсов. Их используют, например, для измерения скорости вращения вала электродвигателя или подсчета продукции на конвейере.
Компьютер обычно является «мозгом» автоматизированной системы. Он принимает сигналы датчиков, исполняет записанную в него программу и выдает необходимую информацию в устройство вывода. Коммуникации между компьютером и устройствами ввода-вывода выполняются через последовательные интерфейсы, например, USB, CAN, RS-232, RS-485, RS-422, Ethernet или параллельный интерфейс LPT. Иногда устройства ввода-вывода выполняют в виде плат, которые вставляют непосредственно в компьютер, в разъемы шины PCI или ISA. Достоинством плат является возможность получения высокой пропускной способности каналов ввода-вывода (свыше 10 Мбит/с), что трудно достижимо при использовании внешних устройств с последовательным портом. Недостатком является более высокий уровень электромагнитных наводок от компьютера и конструктивные ограничения на количество каналов ввода-вывода.
В автоматизированных системах вместо компьютера или одновременно с ним часто используют программируемый логический контроллер (ПЛК). Типовыми отличиями ПЛК от компьютера является специальное конструктивное исполнение (для монтажа в стойку, панель, на стену или в технологическое оборудование), отсутствие механического жесткого диска, дисплея и клавиатуры. Контроллеры также имеют малые размеры, расширенный температурный диапазон, повышенную стойкость к вибрации и электромагнитным излучениям, низкое энергопотребление, защищены от воздействий пыли и воды, содержат сторожевой таймер и платы аналогового и дискретного ввода-вывода, имеют увеличенное количество коммуникационных портов. В контролерах, в отличие от компьютеров, как правило, используется операционная система реального времени (например, Windows СЕ, QNX).
В последнее время наметилась тенденция стирания грани между компьютером и контроллером. С одной стороны, контроллеры (например, NLcon-CE фирмы НИЛ АП или WinCon фирмы ICP DAS) позволяют подключить монитор, мышь и клавиатуру, с другой стороны, появилось большое количество промышленных компьютеров, которые имеют специальное конструктивное исполнение и другие свойства, характерные для контроллеров. В связи с этим в дальнейшем мы будем употреблять термины «компьютер» и «контроллер» как синонимы, и это будет ясно из контекста.
Устройства вывода (модули вывода) позволяют выводить дискретные, частотные или аналоговые сигналы. Дискретные сигналы используются, например, для включения электродвигателей, электрических нагревателей, для управления клапанами, фрамугами, насосами и другими исполнительными устройствами. Частотный сигнал используется обычно для управления средней мощностью устройств с большой инерционностью с помощью широтно-импульсной модуляции.